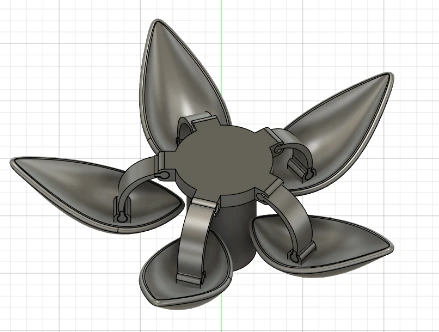
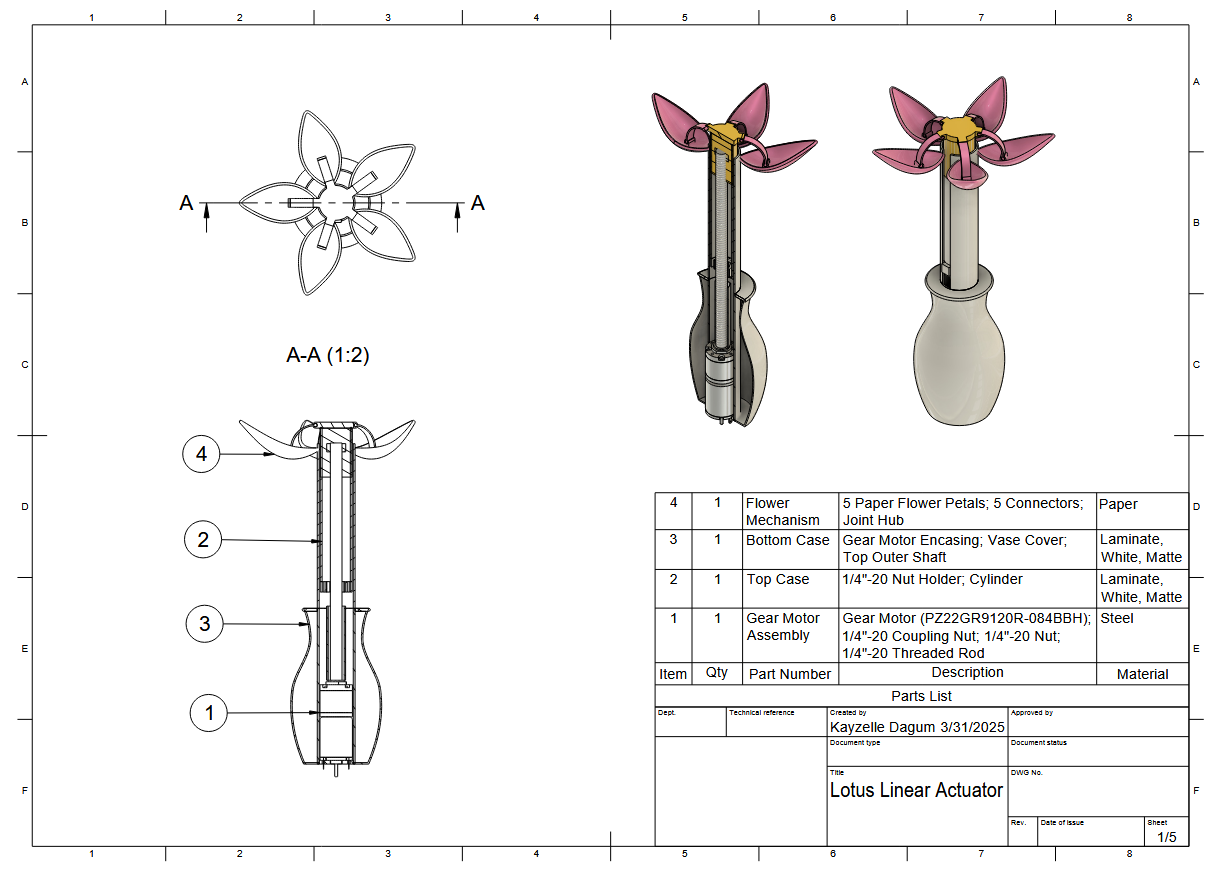
lotus linear actuator
objectives:
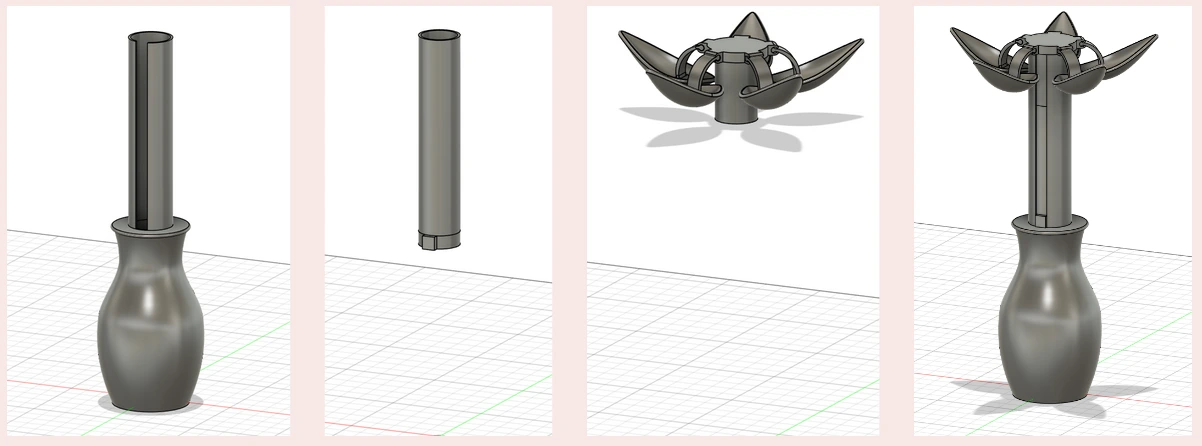
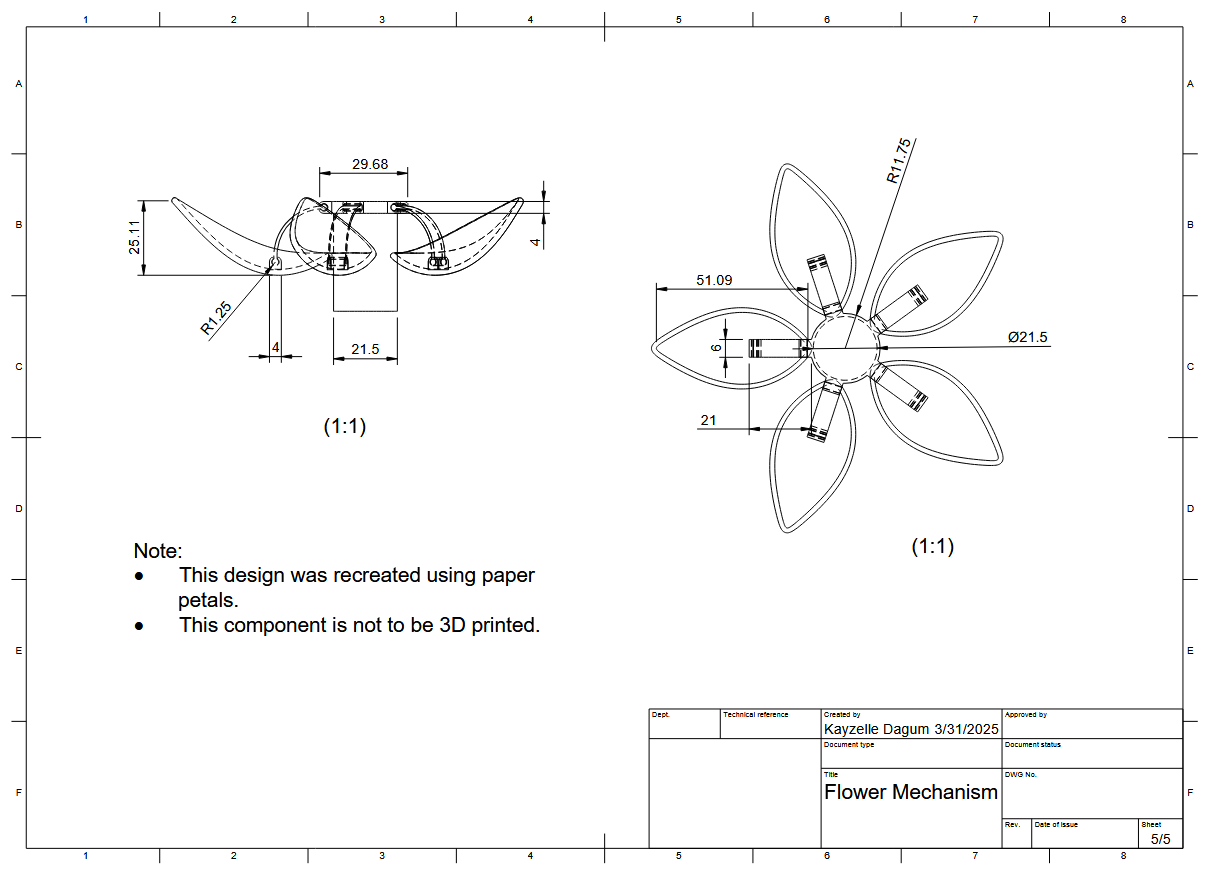
• designed a functional linear actuator inspired by a lotus mechanism using Fusion 360, ensuring precise motion
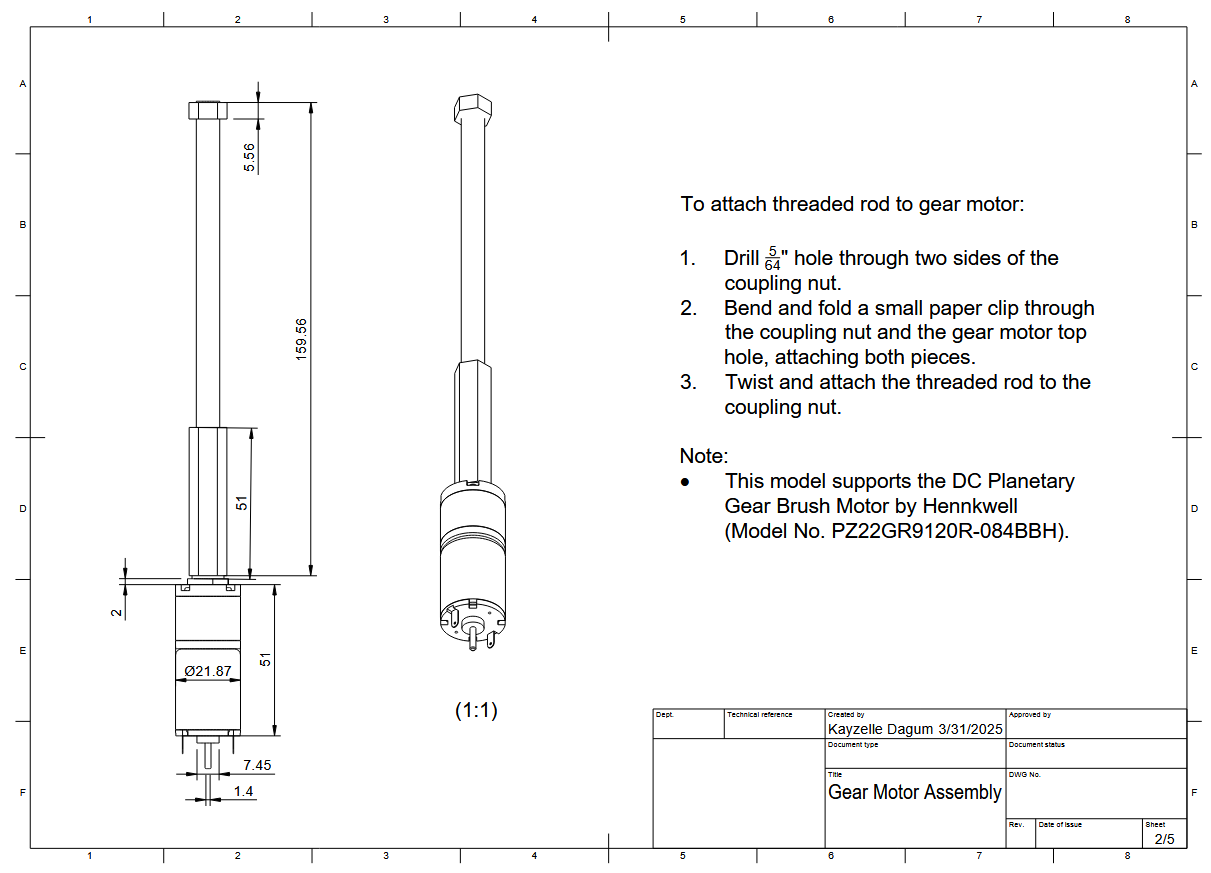
• integrated a gear motor system to convert rotary motion into controlled linear extension and retraction
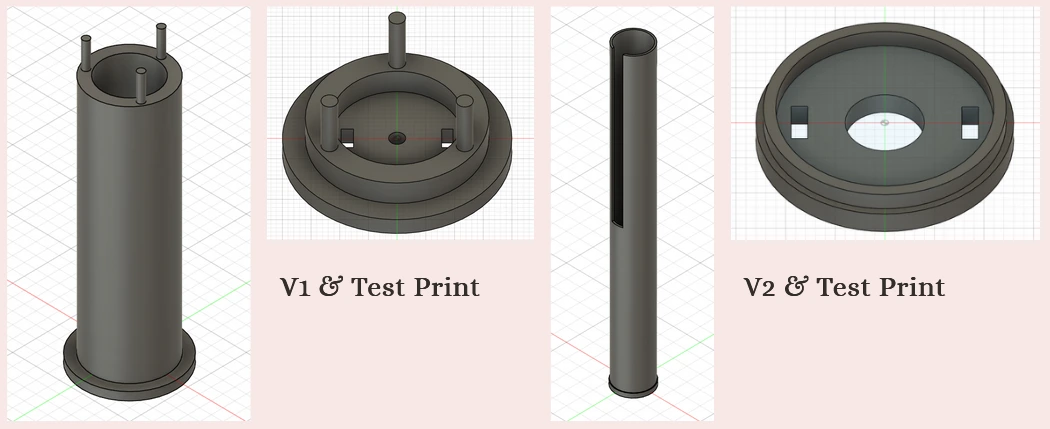
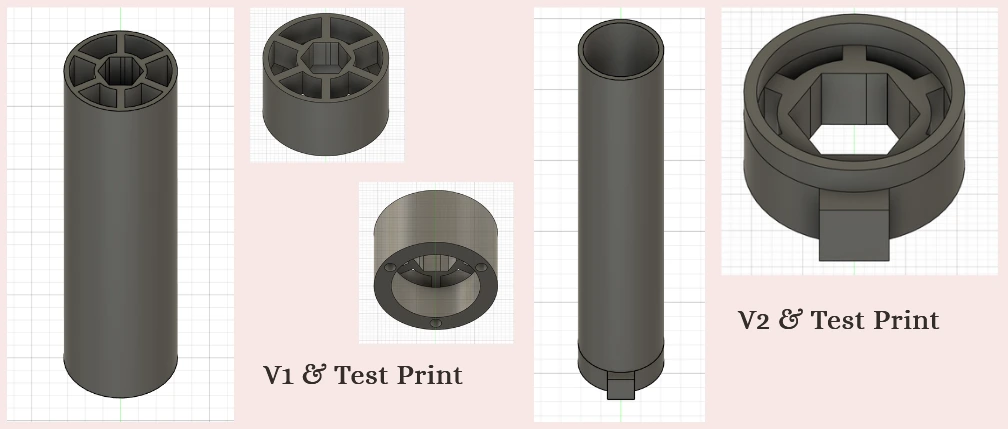
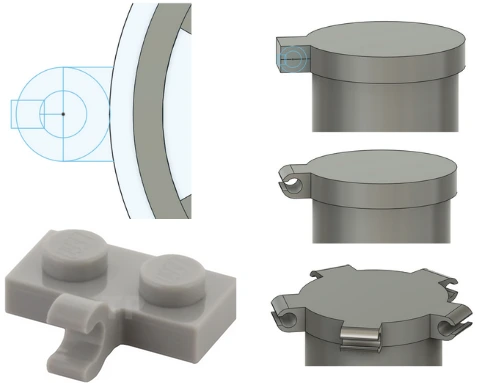
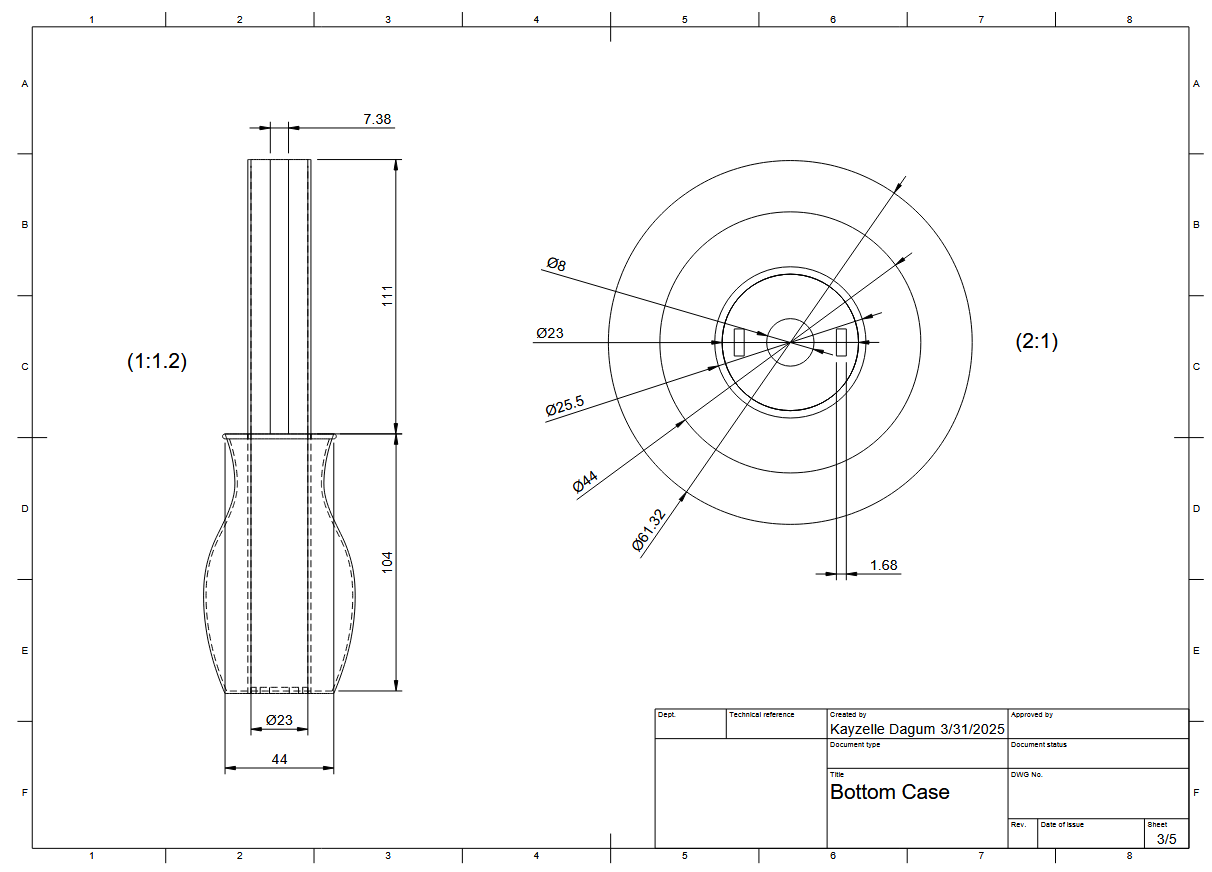
• prepared components for 3D printing, adjusting tolerances for smooth mechanical fit and motor integration
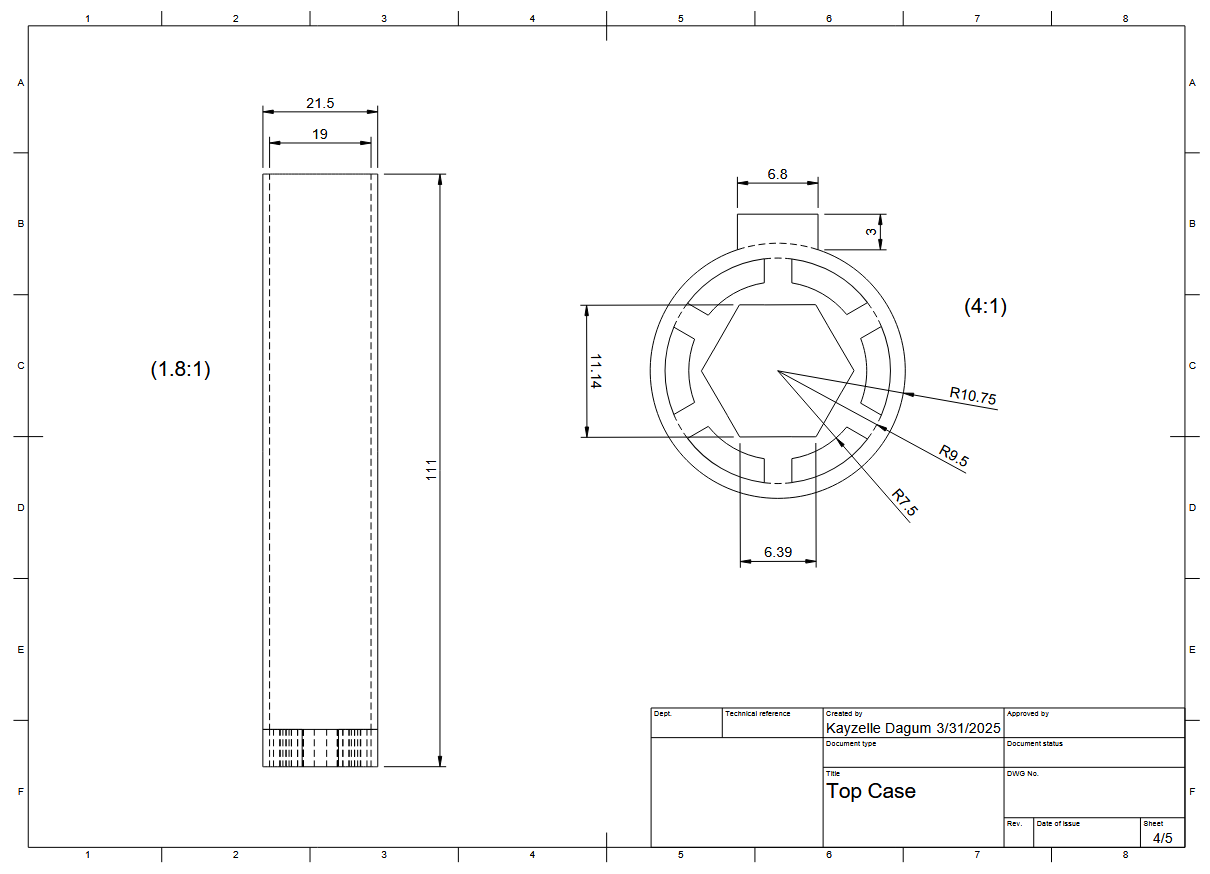
• created a detailed technical drawing of the actuator assembly
skills:
- Fusion 360
- 3D Modeling
- 3D Printing
- Drawing